Especificaciones Generales
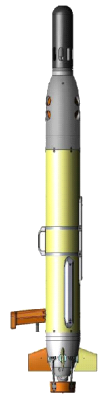 |
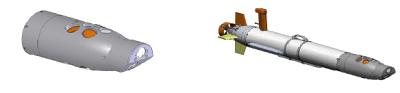
Los vehículos están basados en el modelo Oceanserver Iver2-580-EP35 con las siguientes especificaciones comunes:
- Forma: Tubular – torpedo.
- Tamaño: 140 x 15 cm
- Peso (en aire): 21 kg + sensores
- Profundidad máxima de operación: 100 m (en configuración estándar).
- Autonomía: 8+ hrs (600 W/h batt) @ 2 nudos.
- Comunicaciones: WiFi.
- Navegación: GPS, DVL.
- Procesadores: 2 CPU's basadas en procesador Atom (uno dedicado a futuras expansiones con 8 puertos USB y 16 puertos serie), incluyendo API para interface con el procesador principal.
- Memoria: 2 Discos duros de estado sólido ( 60Gb)
- Puertos: 3 Puertos accesibles en el casco para instalar instrumentación adicional y espacio interior para 3 placas PC-104
- Operativilidad: Lanzamiento y recuperación por un solo hombre desde pequeñas embarcaciones o costa.
- Seguridad: Airbag de seguridad
Ambos vehículos disponen de capacidad para incorporar sensores adicionales
|
Configuración Imagen/Desarrollo
Este vehículo está destinado a la integración y prueba de nuevos desarrollos así como la realización de misiones con cámaras y sidescan sonar.
- Sensores: ADCP/DVL (4 haces (down)/ 1 altimeter), Image/video cameras c/ LED, Sidescan Sonar (330/800Khz)
- Comunicaciones: WiFi
- Navegación: GPS (WAAS )
Configuración Ecomapper
Vehículo para el control de la calidad del agua. Muestreo de alta resolución en aguas someras (litorales e interiores)
| |
- Sensores: YSI 6600 multiparameter sensor:Conductividad,Profundidad,Temperatura,Oxígeno disuelto, Clorofila,pH / ORP,Turbidez,ADCP/DVL (up / down / altimetro)
- Comunicaciones: WiFi
- Navegación: GPS (EGNOS/WAAS)
- Profundidad máxima: 200 m.
|



